平衡直立车要想保证直立,得知当前角度和角速度尤为重要;
加速度计常用两种:数字加速度计和模拟加速度计;
数字加速度计一般通过I2C来传送数据,模拟加速度计直接给出电压读数;
模拟加速度计使用较为简单,而且读取速度和精度基本能满足平衡直立车的需求;
数字加速度计可以进行丰富的配置,获得更加理想的数据而不耗费单片机过多资源。
陀螺仪用来测量角速度。这里用的是模拟陀螺仪,直接用ADC读数。
计算角度的方法
牛顿老人家说过: F = ma; 加速度计能测量加速度a,从而可以得知测量方向上所受的重力分量;
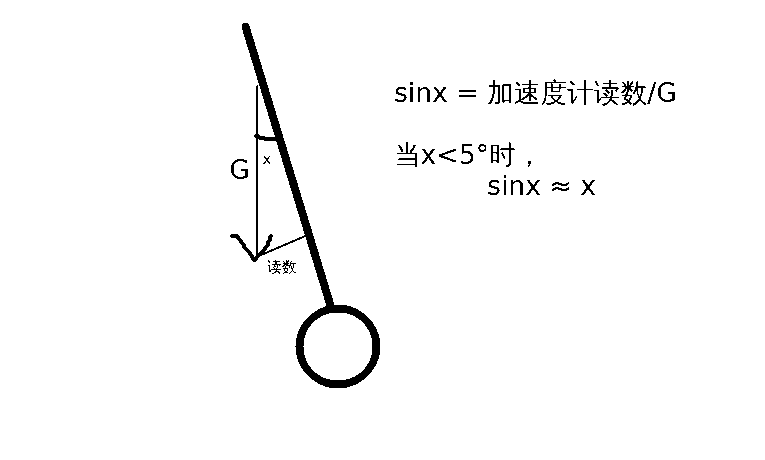
测出小车前后水平放置时,加速度计的读数,可以得到±G的读数。小车行走时,加速度计的读数除以G的读数,就能得到角度值了。
具体请参考互补滤波算法:https://feichashao.com/balance_filter/
(更多…)


