在 debug pacemaker/pcs/pcsd 的时候,我们通常需要知道,敲下 `pcs xxxx xxxx` 命令后,发生了什么动作。
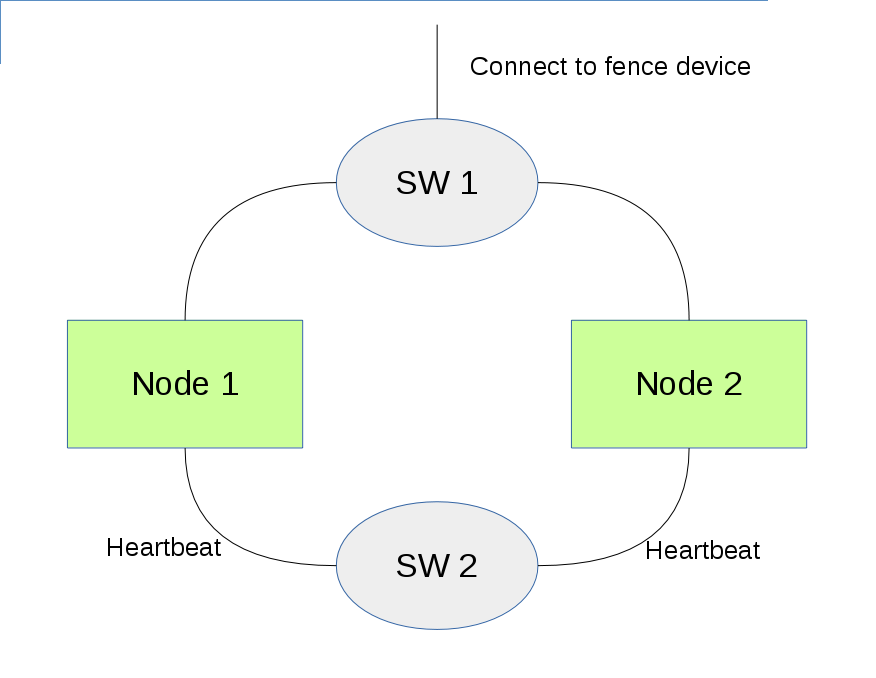
在应用 pcs 进行管理的 pacemaker 集群中,每个节点都会启动一个 pcsd 守护进程,监听 2224/tcp 端口。随后,我们可以从任一节点中,通过 pcs 命令管理整个集群。
误解
按照套路,通常这是一种 client/server 架构, pcs 命令行工具向相应节点的 pcsd 发送请求, pcsd 在相应节点完成动作。
然而实际与此有所出入。
实际套路
实际上,真正对 pacemaker 执行操作的,是 pcs 这个命令行工具。pcsd 负责接收来自其他节点的请求,随之调用本地的 pcs 工具,最后由本地的 pcs 执行操作。
本地命令示例
以 `pcs cluster start` 命令为例。在 Node A 中执行 `pcs cluster start`, Node A 本地的 cluster 相关服务将被启动。
在此操作中,不需要经过 pcsd. 即, pcs ---> execute. 具体过程如下。
继续阅读“Pacemaker管理工具中 pcs/pcsd 的关系”